Анализ гранулометрического состава
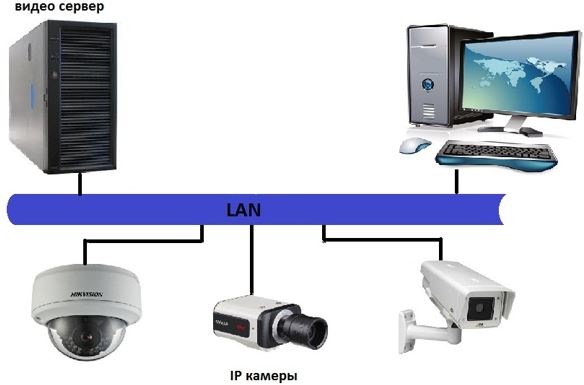
Система компьютерного зрения для контроля фракционного состава материала, выявления негабарита, примесей и расчета технологически значимых характеристик в потоке.
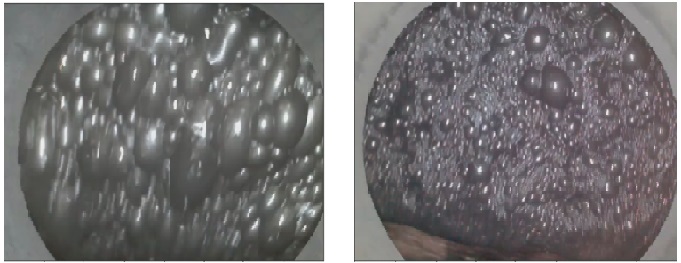
Визуальный анализ материала

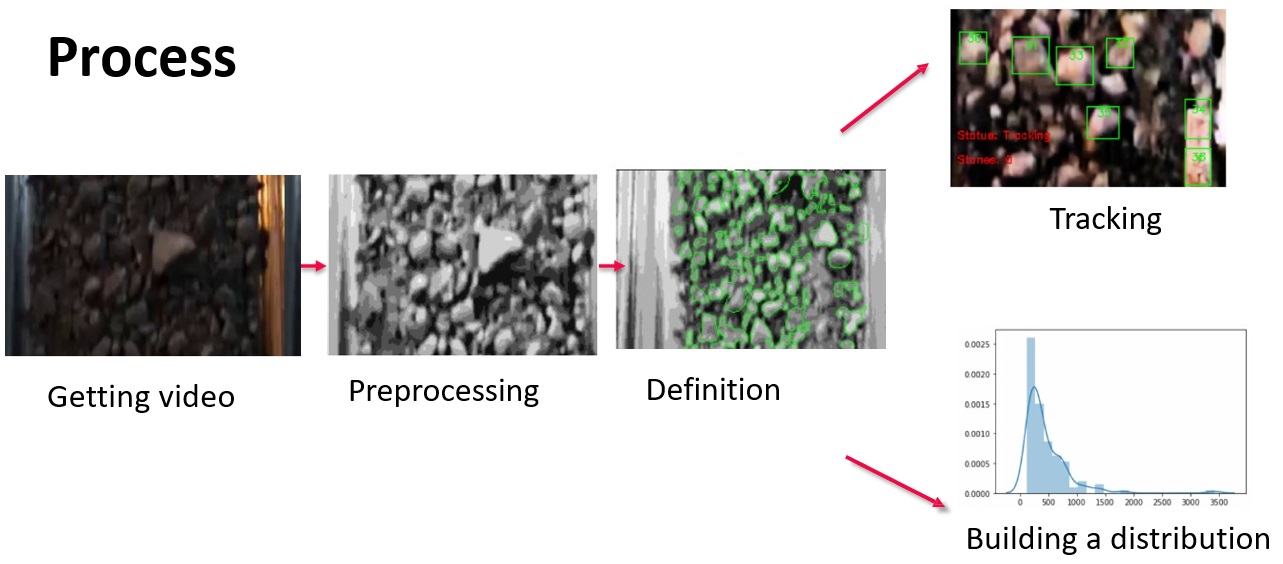
Задача и подход
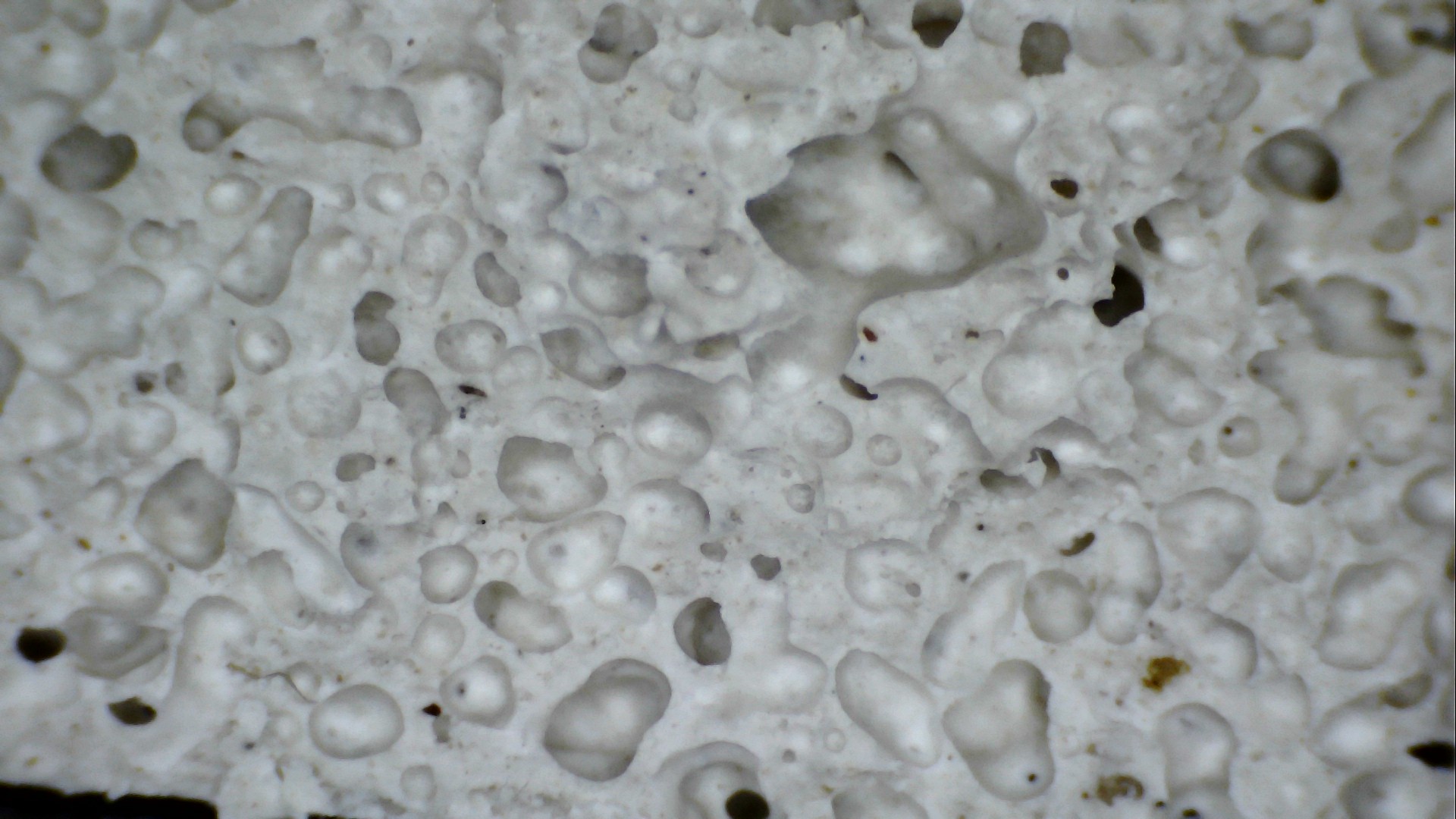
Гранулометрический состав показывает распределение частиц материала по размерам. Ручной лабораторный контроль и визуальная оценка дают выборочную картину и часто запаздывают относительно реального технологического процесса.
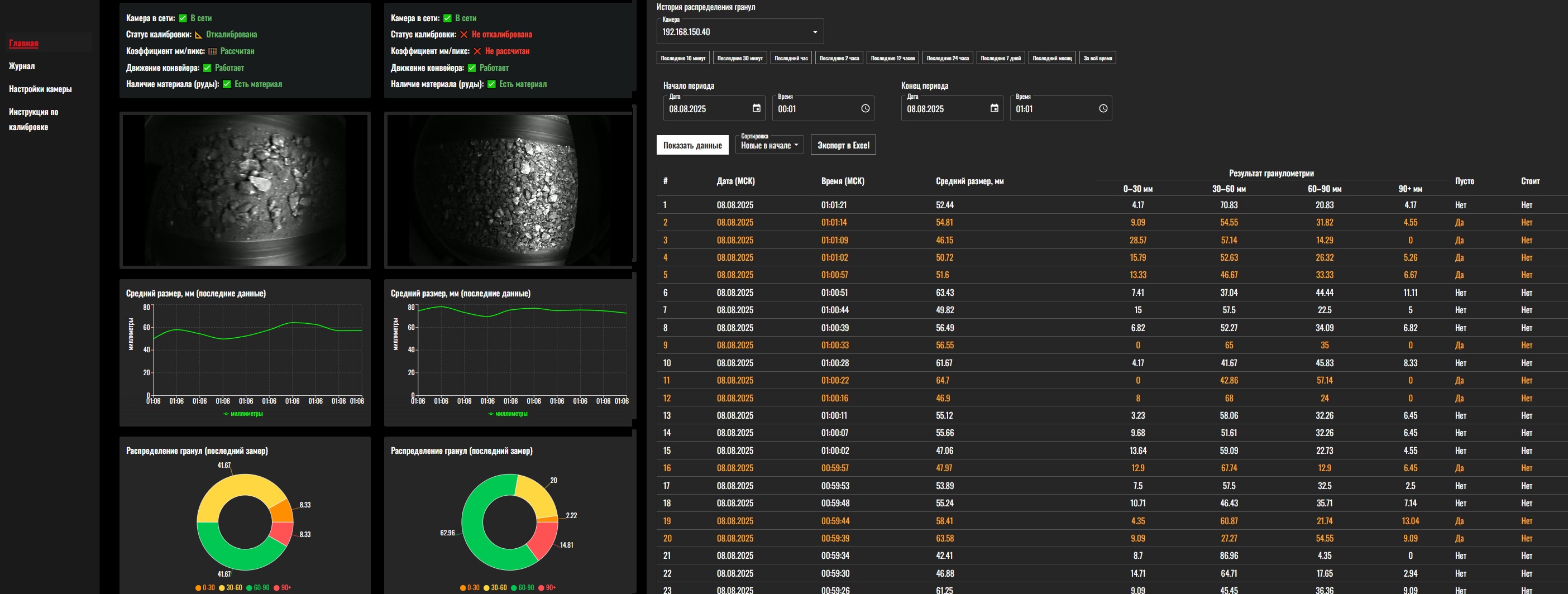
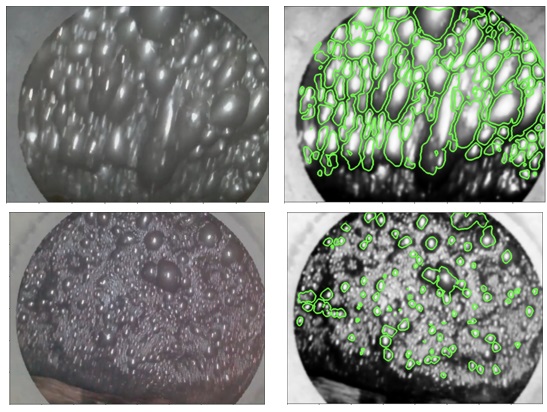
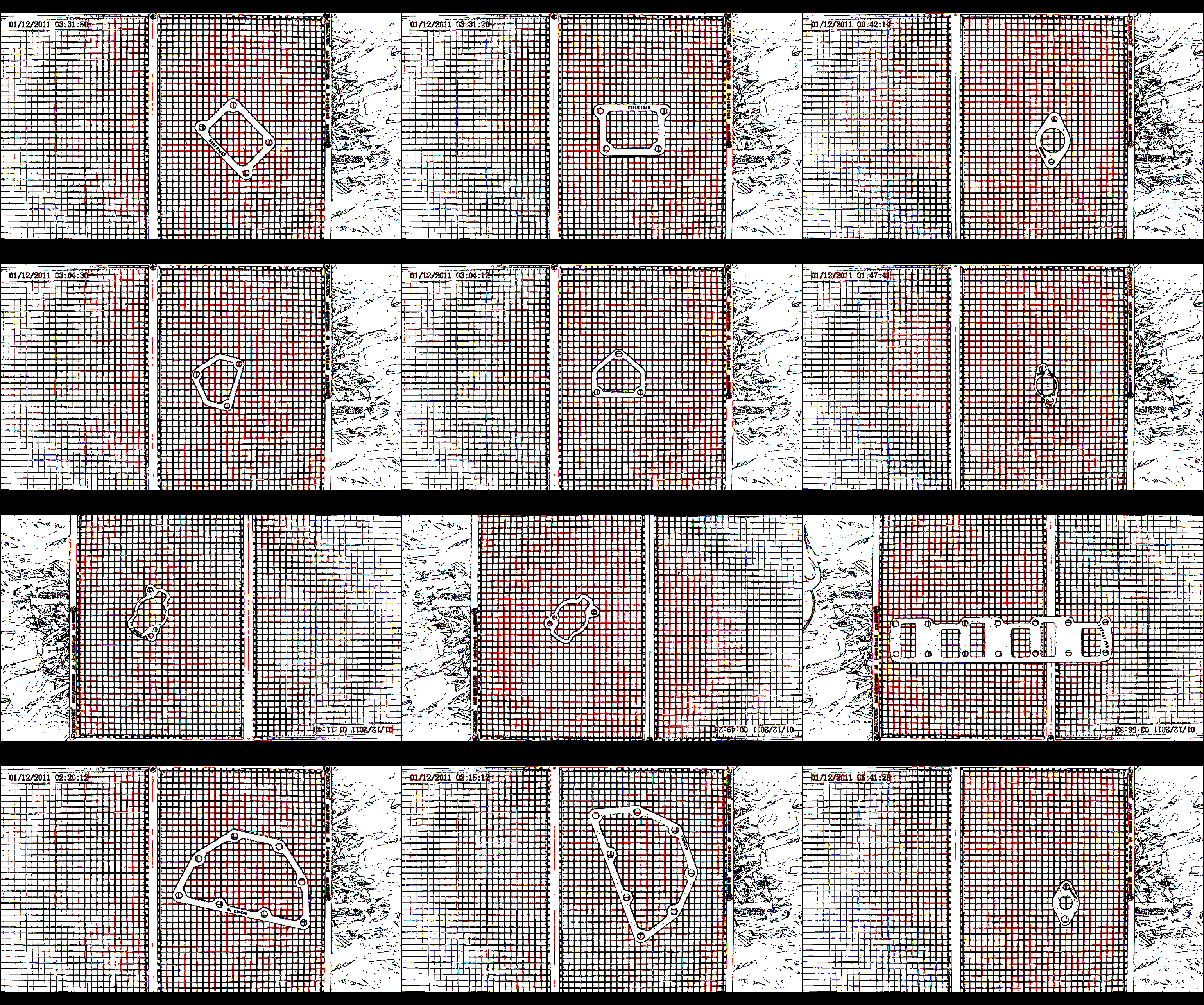
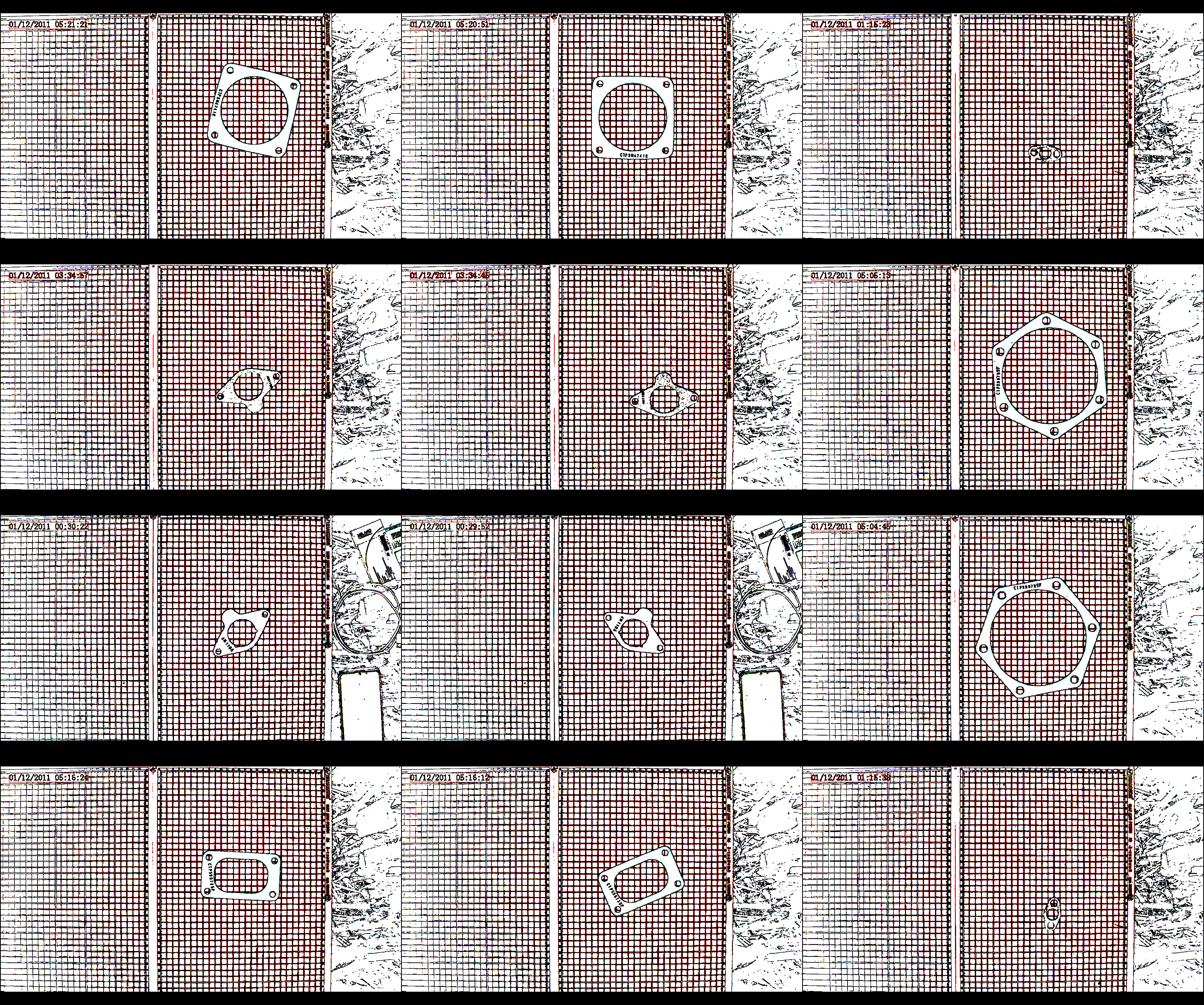
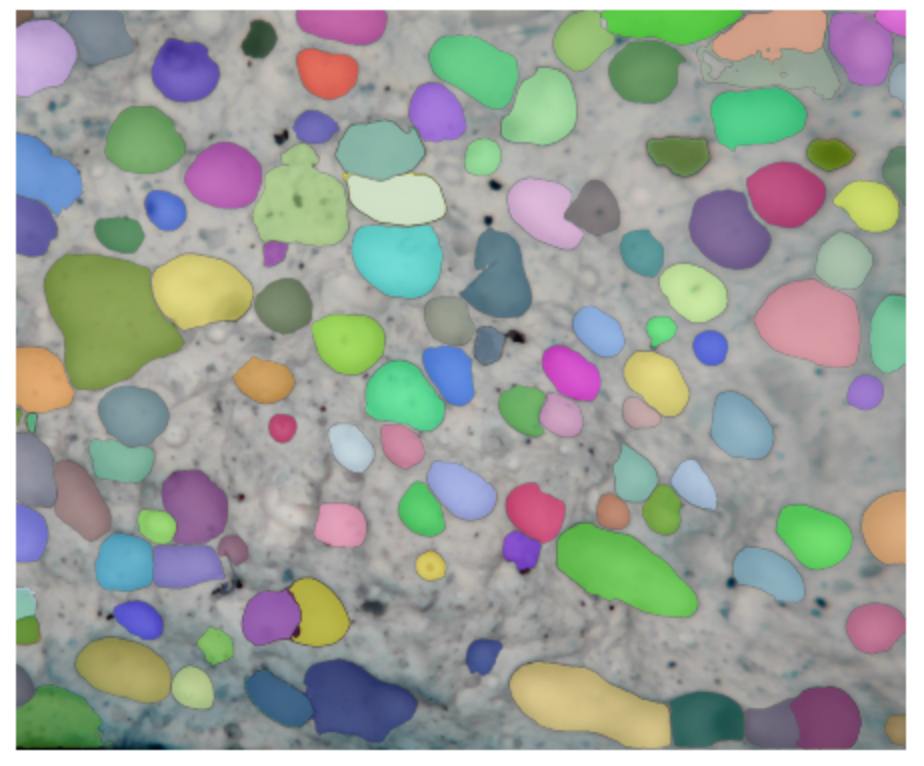
Система машинного зрения анализирует поверхность материала, выделяет частицы, оценивает размерные признаки и помогает оперативно выявлять отклонения, негабарит и потенциально опасные включения.
Что дает система
- обнаружение и оценка размеров отдельных гранул;
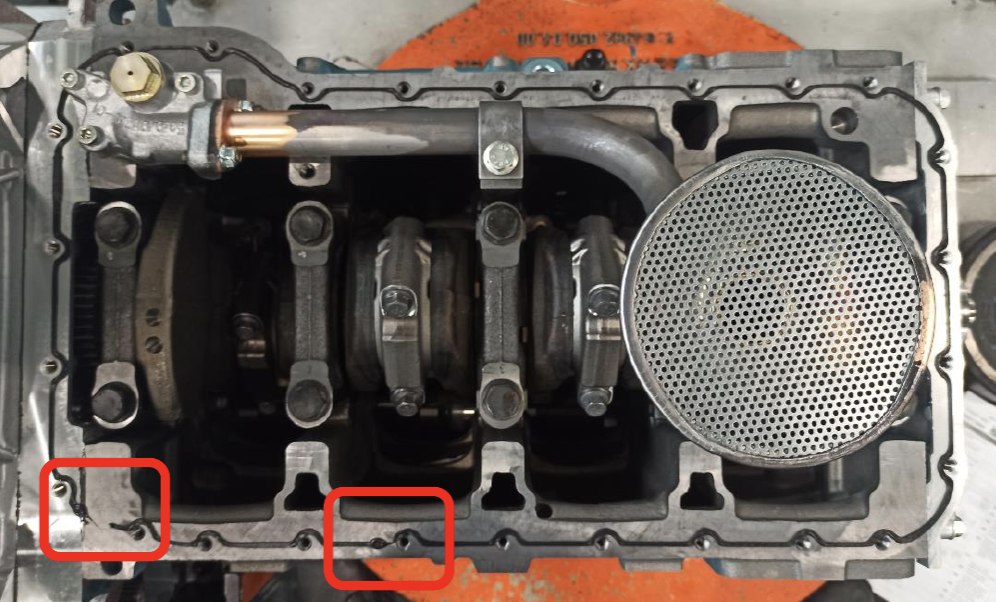
- идентификация примесей и инородных объектов;
- классификация материала по размерным классам;
- снижение ручных операций и ошибок визуального контроля;
- данные для управления дроблением и предупреждения аварийных режимов.
Сравнение методов сегментации
| Класс | Реальное положение: камни | Реальное положение: фон | Точность | Полнота | Время на кадр |
|---|---|---|---|---|---|
| Камни | TP = 736 | FP = 490 | 60% | 84% | 0.04 с |
| Фон | FN = 134 | TN = 0 | 60% | 84% | 0.04 с |
| Класс | Реальное положение: камни | Реальное положение: фон | Точность | Полнота | Время на кадр |
|---|---|---|---|---|---|
| Камни | TP = 947 | FP = 56 | 94,4% | 94,9% | 0.09 с |
| Фон | FN = 23 | TN = 0 | 94,4% | 94,9% | 0.09 с |
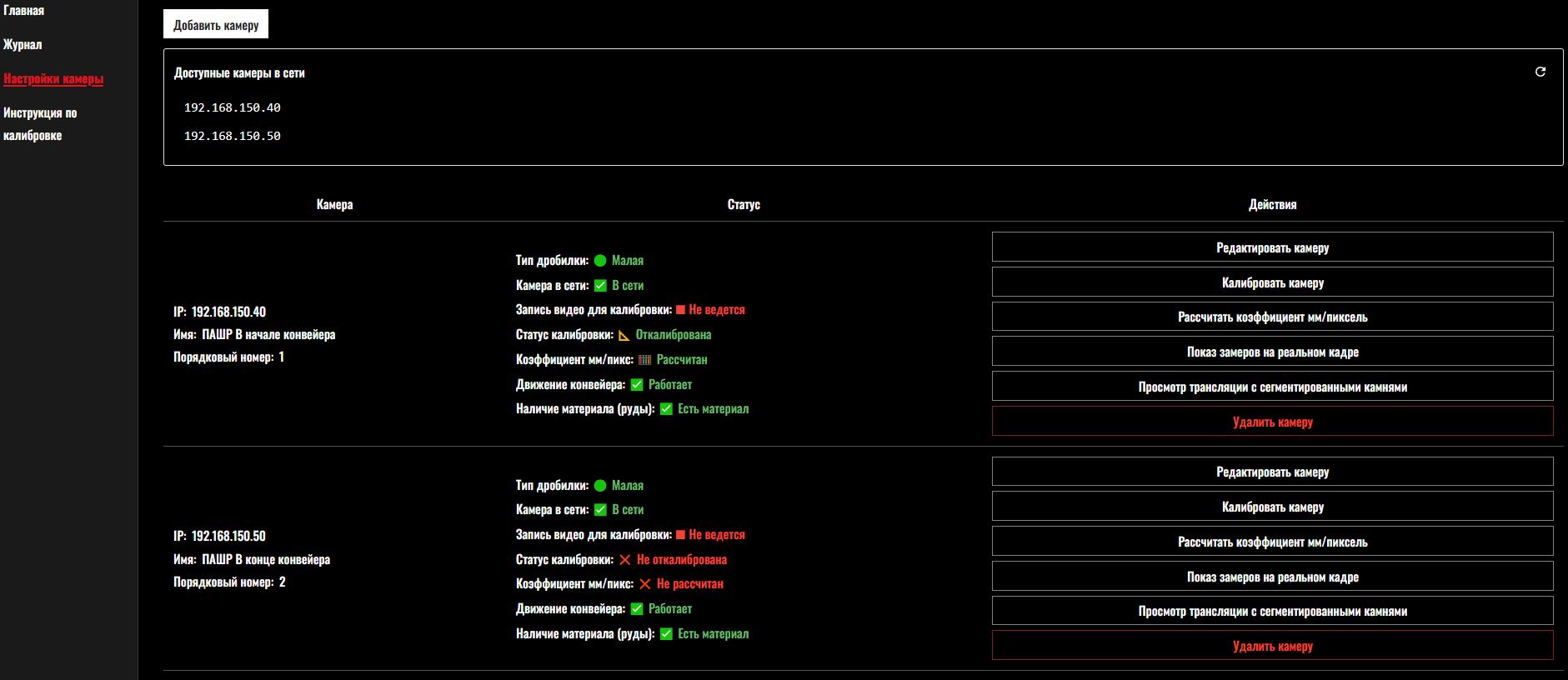
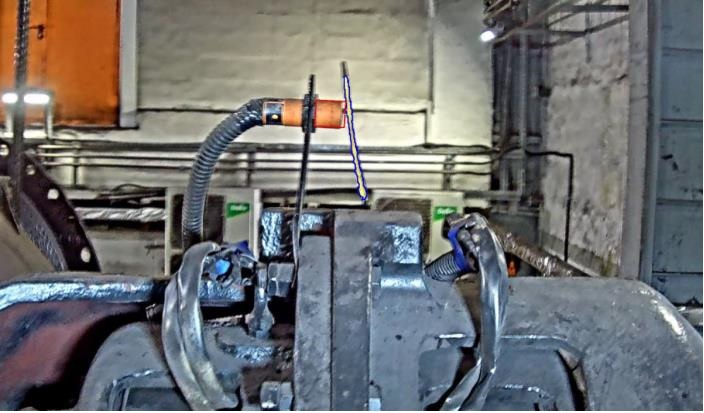
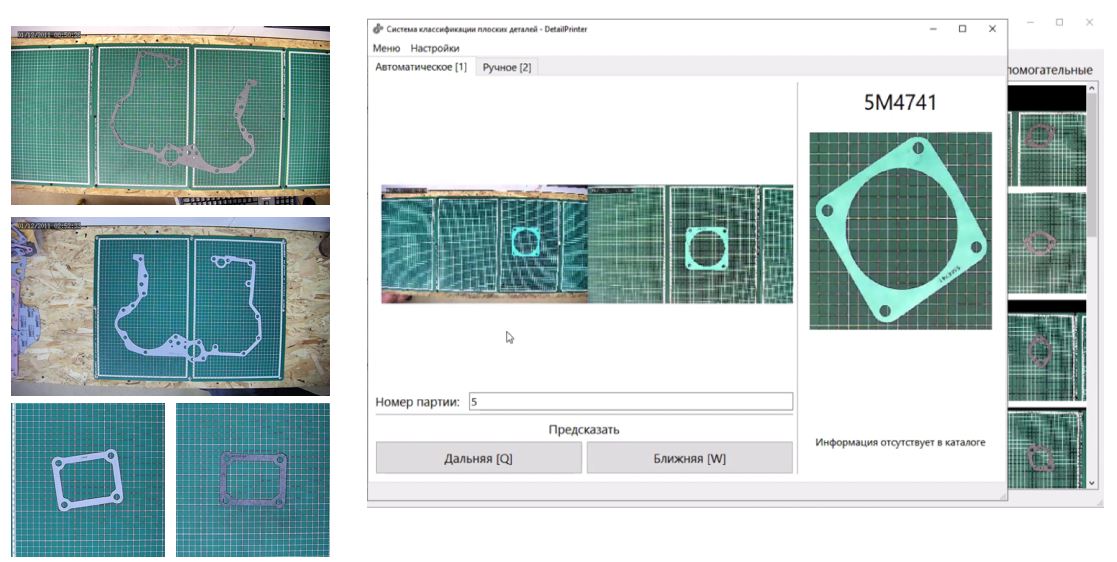
Интерфейс и работа системы