Приложения системы
- Главная
- Проекты
1. Анализ гранулометрического состава
- Категория: Компьютерное зрение
- Заказчик: ГМК
- Дата: 2020
- Скачать презентацию
Система анализа гранулометрического состава, разработанная с использованием передовых технологий компьютерного зрения, обеспечивает высокую точность измерения гранулометрического состава. Эта система особенно применима к многочисленным промышленным предприятиям, особенно в горнодобывающей, перерабатывающей и металлургической отраслях. Оценивая гранулометрический состав материалов непосредственно на конвейерных лентах, он может предложить очень актуальное решение для этих отраслей.
Существующие решения

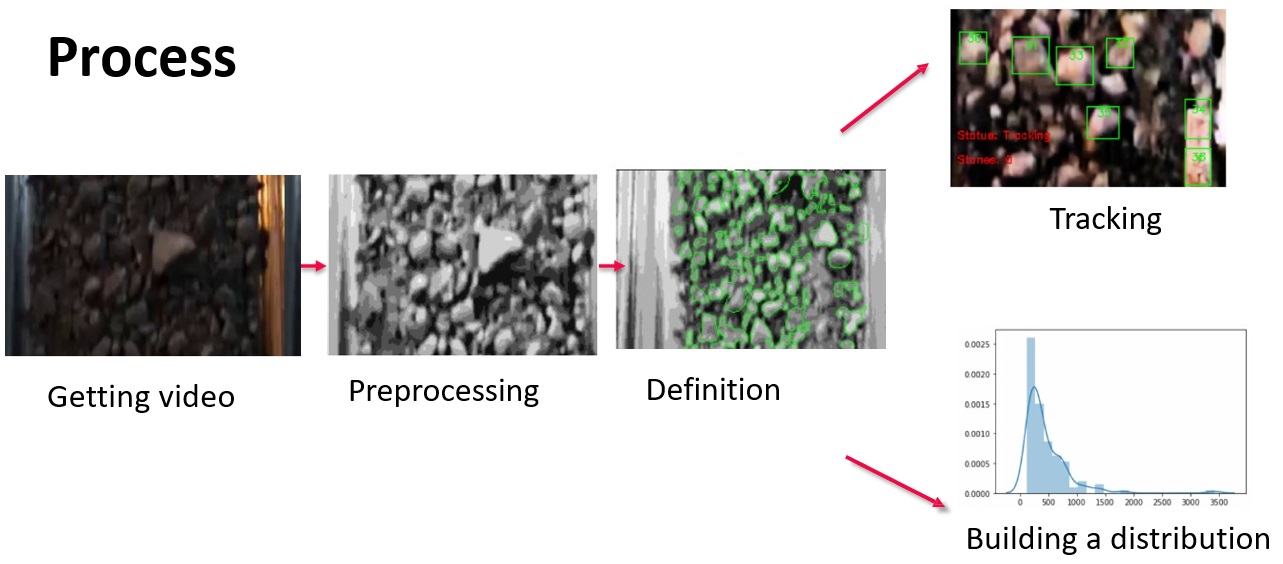
Описание процесса
| Реальное положение (камни) | Реальное положение (фон) | Точность | Полнота | T(1 кадр) | |
|---|---|---|---|---|---|
| Камни | TP = 736 | FP = 490 | 60% | 84% | 0.04 с |
| Фон | FN = 134 | TN = 0 | 60% | 84% | 0.04s |
Таблица 1 (Метод водораздела)
| Реальное положение (камни) | Реальное положение (фон) | Точность | Полнота | T(1 кадр) | |
|---|---|---|---|---|---|
| Камни | TP = 947 | FP = 56 | 94,4% | 94,9% | 0.09 с |
| Фон | FN = 23 | TN = 0 | 94,4% | 94,9% | 0.09 с |
Таблица 2 (Нейронная сеть)
Традиционные методы оценки, включающие ручные лабораторные исследования выборочно отобранных материалов и визуальный контроль со стороны оператора, часто менее желательны из-за их неэффективности и потенциальных неточностей. Тем не менее, система на основе компьютерного зрения предлагает решение, обеспечивающее точность до 95% при гранулометрической оценке.
В отличие от обычных ручных проверок, которые сосредотачиваются на случайных местах расположения образцов, системы машинного зрения анализируют всю поверхность сырья, тем самым обеспечивая более полную и точную оценку. Это включает:
- Обнаружение и определение размеров отдельных гранул
- Идентификация примесей
- Классификация гранул по размеру
- Прогнозирующий анализ распределения размера гранул по всей глубине потока материала
Эти возможности становятся особенно важными на стадиях дробления и измельчения, а также при подготовке руды. Эти процессы являются энергоемкими, и любое нарушение, например, закупорка материала, может привести к значительному простою, что повлияет на общее производство. Алгоритмы машинного зрения, распознавая потенциальные включения в потоке руды, которые могут представлять опасность, позволяют оптимизировать управление дробилкой и, в экстренных случаях, останавливать конвейерную систему.
Внедрение этой системы дает множество преимуществ:
- Предотвращение ускоренного износа производственных активов
- Сокращение затрат на лабораторный анализ фракций
- Минимизация операционных расходов на производстве
- Улучшение контроля качества добываемых полезных ископаемых
- Повышение качества оперативного управления
- Сокращение человеческих ошибок
Внедрение системы включает несколько этапов:
- Установка и настройка необходимого оборудования (при необходимости)
- Сбор данных для разработки, переобучения и оптимизации моделей в определенных условиях
- Интеграция с существующими производственными системами
2. Анализ движения объектов (людей, транспортных средств и т.д.)
- Категория: Компьютерное зрение
- Заказчик: Единые Электронные Системы
- Дата: 2022
Система обеспечивает подробный анализ движения объектов, включая людей, легковые автомобили, грузовики, велосипеды, мотоциклы, пешеходов или любой указанный пользователем объект.

Его ключевая сила заключается в масштабируемости и эффективности, что позволяет быстро развертывать решение промышленного уровня, способное решать широкий спектр задач, от мониторинга движения на дорогах общего пользования до отслеживания объектов в торговых центрах, контрольно-пропускных пунктах, заводских мастерских и конвейерах. ремни. Простота использования этой системы обусловлена ее интуитивно понятной функцией разметки пространства, дополнительными возможностями обучения модели, встроенной предварительно обученной системой для обнаружения и отслеживания объектов, а также ее полной совместимостью с другими компонентами библиотеки.
Его адаптируемость как для внутренней, так и для наружной среды обеспечивается графическим интерфейсом, который позволяет пользователям определять области и потоки. Отображая исходный видеокадр или любой кадр с камеры наблюдения, пользователи могут рисовать любое количество линий для подсчета проходящих через них объектов или определять области произвольной формы для контроля наличия или отсутствия тех или иных объектов.
Хотя разработанная функциональность совместима с любым алгоритмом обнаружения и отслеживания объектов, в конфигурации по умолчанию используется модель YOLOv5 для обнаружения объектов и алгоритм корреляционного множественного отслеживания для отслеживания объектов. Эти решения обеспечивают высокую точность, а отслеживание введено для повышения скорости системы за счет снижения нагрузки на оборудование, что снижает затраты на разработку более специализированных решений без существенной потери точности обнаружения.
При выполнении операции анализа потока система отображает информацию о различных отслеживаемых объектах. Он демонстрирует кадры объектов, которые помогают оценить точность обнаружения и отслеживания объектов. Различные типы объектов обозначаются разными цветами рамки. При пересечении предопределенной линии объект регистрируется в системе, потенциально вызывая звуковое или текстовое оповещение в консоли. Для более сложного поведения при пересечении линии система может функционировать как API.

Определение опасных зон

Пример определения прибытия в заданный район
Благодаря адаптивности модели к разным условиям освещения детектор объектов сохраняет высокую точность днем и ночью при различных источниках света.
3. Анализ флотационной картины
- Категория: Компьютерное зрение
- Заказчик: ГМК
- Дата: 2021
- Скачать презентацию

Процесс флотации

Цилиндрическая флотационная камера
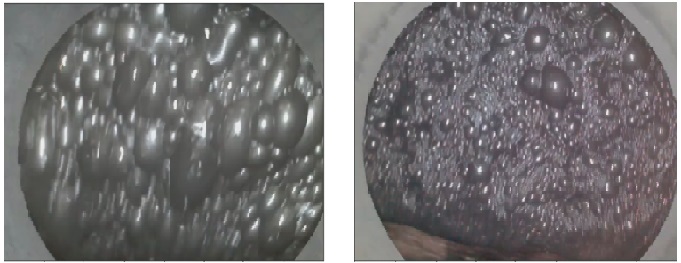
Мелкая и крупная пена
Определение размера пузырьков, количества пузырьков и скорости спуска пены методами компьютерного зрения.
Ключевые анализируемые показатели:
- Цвет поролона
- Диаметр пузырька (распределение)
- Скорость удаления пены
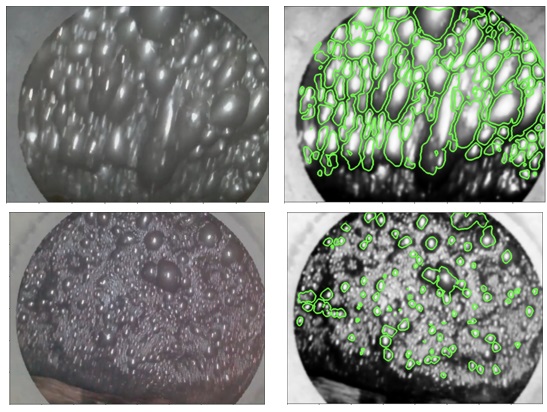
Исходное изображение и рассчитанные контуры
Система компьютерного зрения создает карты сегментации, которые необходимы для:
- Размеры здания
- Отслеживание
- Оценка определенного цвета пузырьков

Создание обучающей выборки методом водораздела

Обучение нейронной сети U-net обнаруживать только большую пену
- Площадь вычисляется с использованием алгоритма поиска в ширину на основе бинарных карт сегментации.
- Центры пузырей рассчитываются путем вычисления их центров масс.
- Расстояние между пузырьками зависит от их площади, координат центров и некоторых гиперпараметров
- Отслеживание осуществляется путем нахождения ближайших пузырьков из следующего кадра относительно функции расстояния между пузырьками.
- Если минимальное расстояние для определенного пузыря превышает заданный порог, мы делаем вывод, что он схлопнулся.
4. Система анализа параметров тормозной системы доменной печи
- Категория: Компьютерное зрение
- Заказчик: ГМК
- Дата: 2021
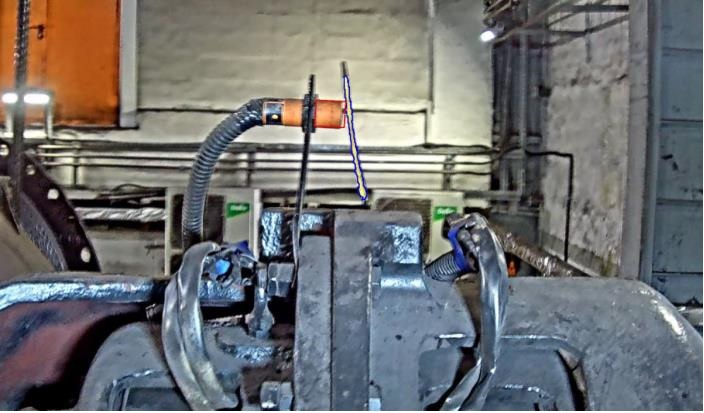
Исходный кадр

Исходный кадр

Вычисление расстояния
Описание системы
Система использует видеопоток, видеофайл или набор фотографий в качестве входных параметров и генерирует результаты, определяя различные характеристики процесса:
- Контроль фактического сжатия и разжима тормозных колодок
- Измерение расстояния
и предупреждение об отклонении от заданного значения. Кроме того, предоставляются рекомендации по оптимальному качеству видео и количеству кадров в секунду (fps).
Сегментационная карта:
- Для расчета расстояния
- Для отслеживания и оценки цвета
Этапы:
- Захват объекта
- Извлечение контура
- Вычисление расстояний между объектами в пикселях на основе их площади, цвета, координат центра и конкретных гиперпараметров
- Перевод расстояний в пикселях в метрическую систему
- Отслеживание объектов
Точность системы приблизительно 1 мм.
5. Система классификации деталей
- Категория: Компьютерное зрение
- Заказчик: Промышленность
- Дата: 2023
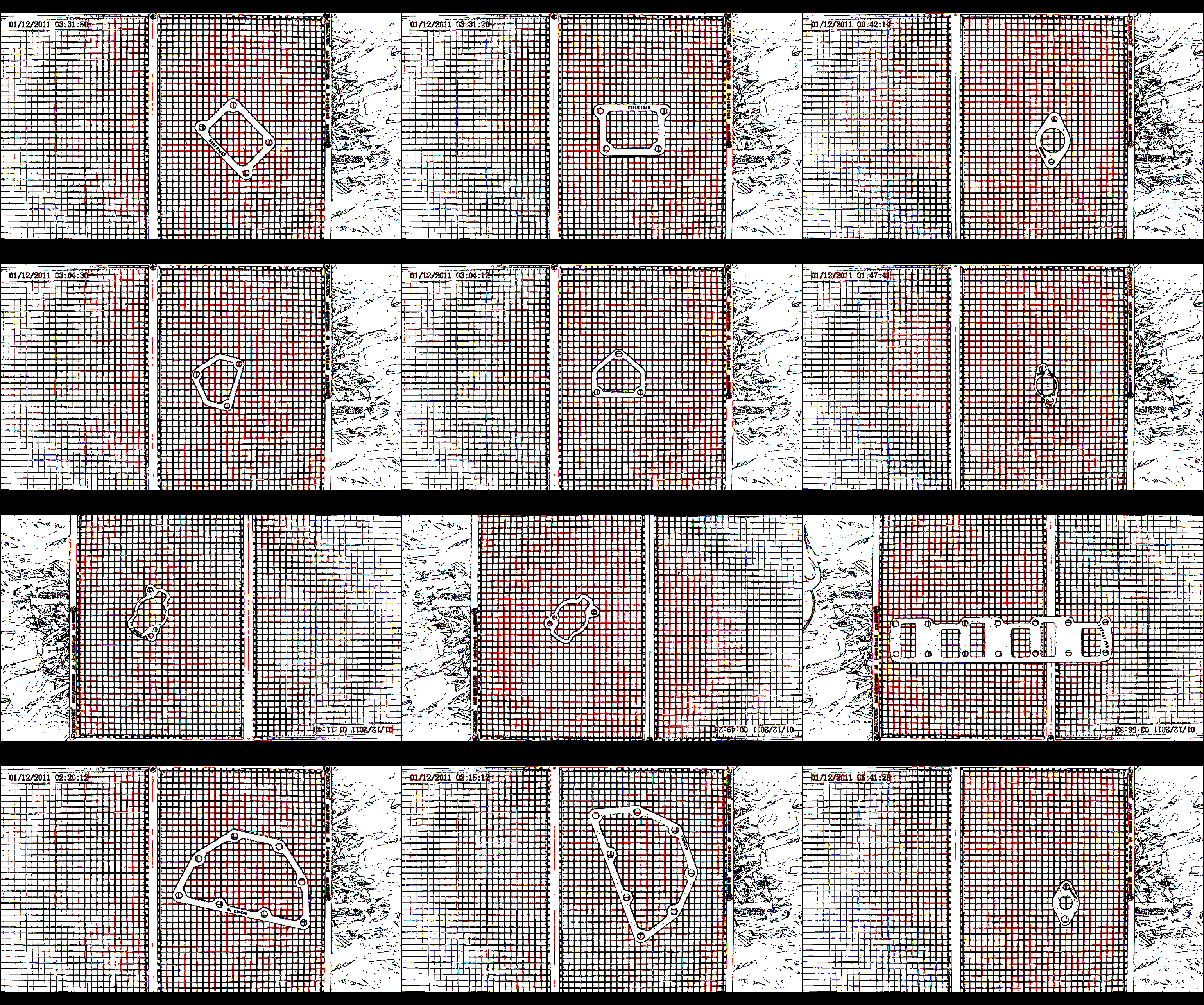
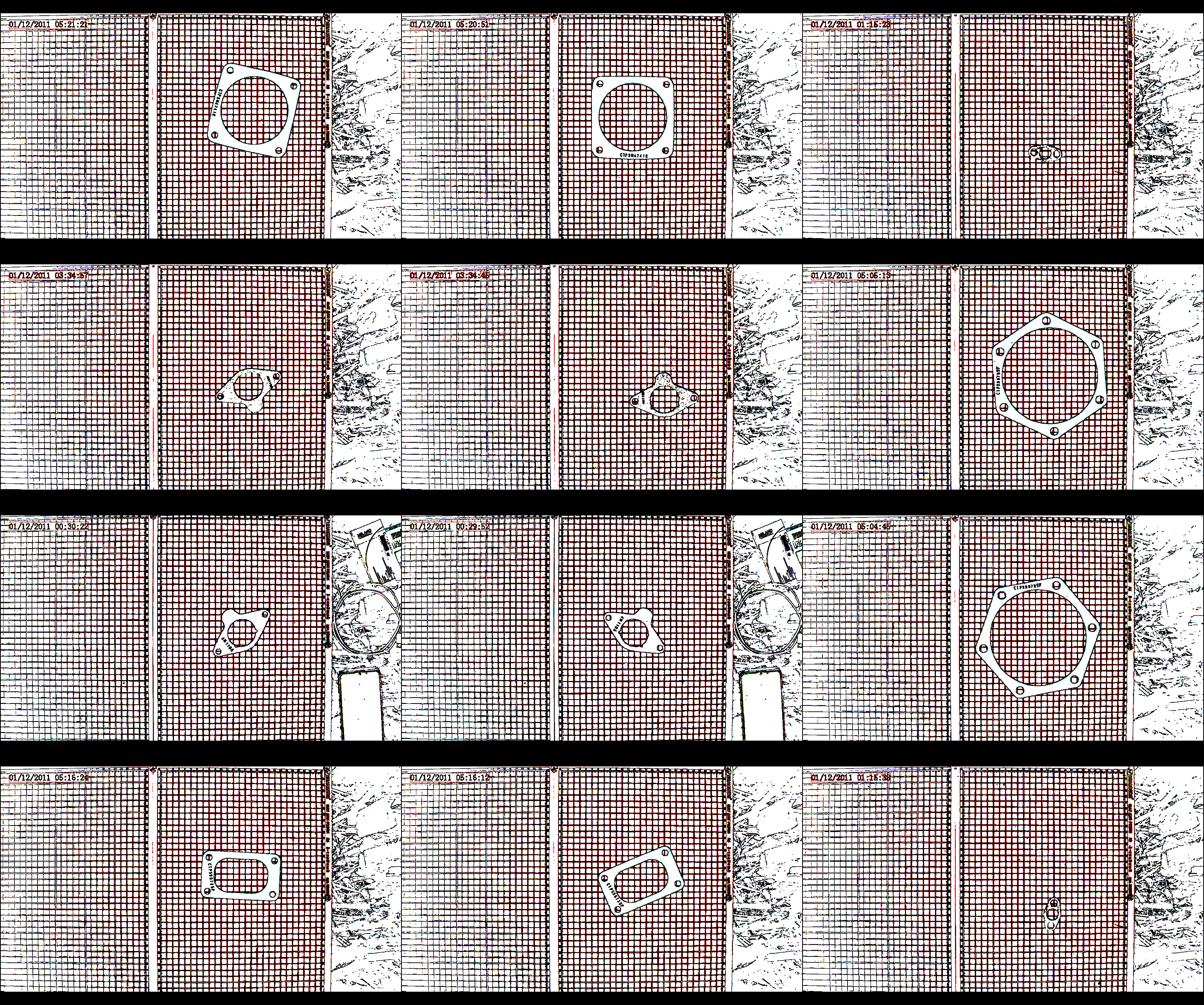
Система классификации деталей, построенная на базе алгоритмов компьютерного зрения позволяет автоматически определять тип детали, ее артикул, характеристики, а также выделять бракованные детали.
Обзор системы
Разработана система классификации плоских деталей. Девяносто процентов диапазона составляют размеры от 20 мм до 600 мм, размеры деталей менее 200 мм могут отличаться по размеру не более чем на 1 мм.
Фотография детали используется в качестве входных параметров системы. Результат формируется в виде классификации детали (отнесение детали к одному из 3800 классов). Система позволяет добавлять новые виды деталей для классификации (вводить в систему новую номенклатуру), а также имеет возможность генерировать данные для принтера этикеток.
Система достигает точности приблизительно 99,9%.
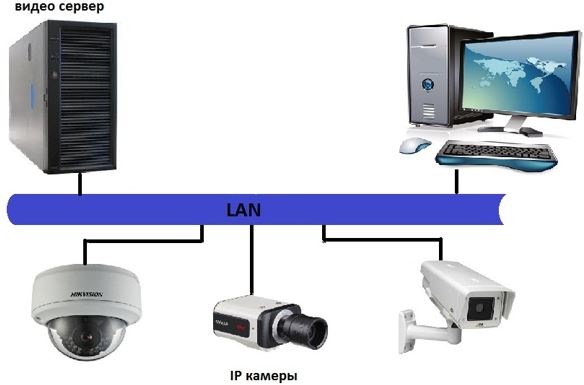
Система состоит из следующих компонентов:
- IP-камеры
- Вычислительный сервер/компьютер для анализа и вывода результатов
- Программное обеспечение «Система классификации деталей»
- (опционально) освещение, специализированная поверхность
Особенности системы
- Позволяет проводить классификацию любых деталей и объектов, выявлять брак, распознавать геометрические размеры
- Работает со стандартными IP-камерами, которые могут подбираться индивидуально
- Быстрая донастройка (дообучение) системы под новые виды деталей без участия разработчиков
- Простой и понятный интерфейс (web/десктоп)
- Возможность интеграции со внутренней инфраструктурой заказчика для автоматизации управления различными устройствами
Процесс внедрения
Процесс внедрения состоит из следующих шагов:
- Установка камер и серверного оборудования
- Настройка системы под типовые детали на предприятии
- Эксплуатация
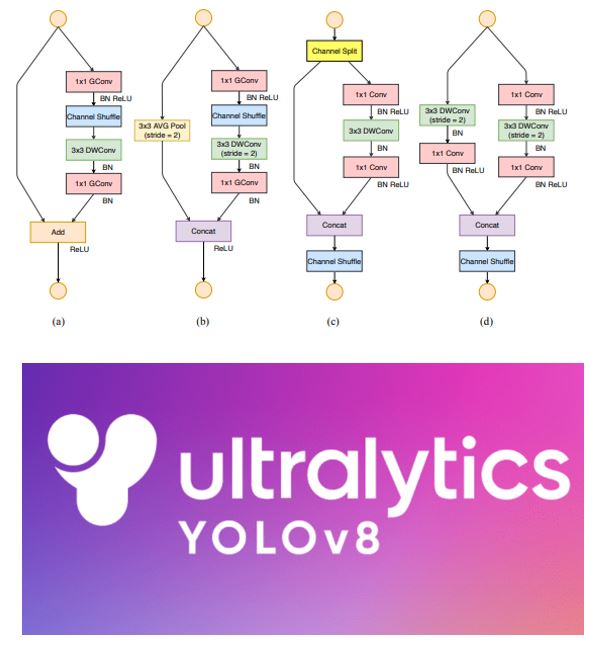
Технические детали
В системе используются следующие модели компьютерного зрения:
- ShuffleNetV2
- Yolov8
- RegNet
Различные модели используются для распознавания деталей разных размеров
Точность системы
Анализ точности системы с использованием нескольких камер:
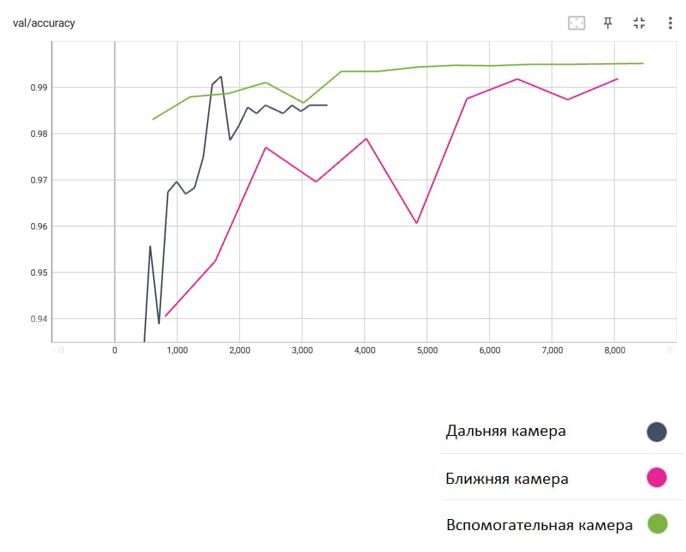

Схема системы
Особенности системы

Процесс внедрения
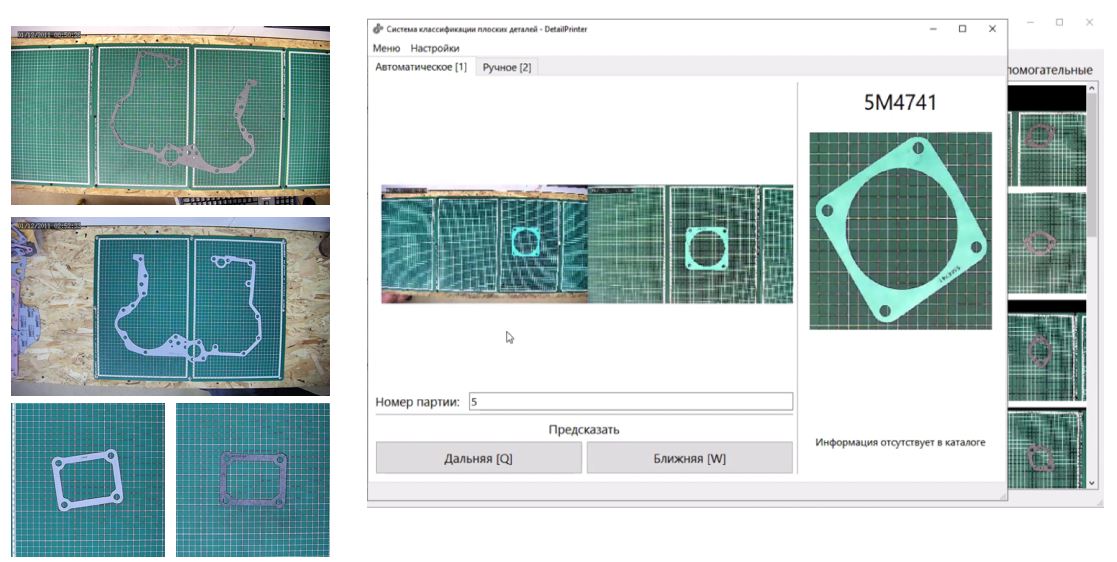
Интерфейс системы
Example
Обучение
Тестирование
6. Распознавание характеристик домохозяйств с помощью аэрофотосъемки и спутниковых снимков
- Категория: Компьютерное зрение
- Заказчик: Урбанистика
- Дата: 2023

Пример 1

Пример 2

Пример 3

Пример 4

Пример 5

Пример 6
Описание системы
В рамах реализации системы, были реализованы следующие задачи:
- Выделение ключевых признаков для классификации домохозяйств
- Разработка и реализация алгоритмов классификации домохозяйств
- Сопоставления снимков с БПЛА со спутниковыми снимками
- Формирование полетного задания в случае невозможности классификации по спутниковым снимкам
- Оптимизация полетного задания